視覺(jué)部分需求:
1相機(jī)從下往上拍照��。
2定位:±5條(需要保證運(yùn)動(dòng)控制部分的精度)
3 角度精度:±2度
視野大小(FOV):2.4mm x1.8mm
相機(jī)數(shù)量:1顆
相機(jī)分辨率:1280x960(130萬(wàn))
視覺(jué)精度:2.4mm/1280Pixel =0.001875mm/Pixel
裝針檢測(cè)插針機(jī)設(shè)備視覺(jué)需求細(xì)分
| 項(xiàng)目 | 具體指標(biāo) |
| 需定位調(diào)整物體 | 針頭 |
| 待貼物體 | 過(guò)濾器容器 |
| 視野范圍 | 2.4mm x 1.8mm |
| 像素精度 | 0.001875mm/Pixel |
| 定位精度 | ±0.05mm |
| 最終定位精度 | ±3條(±0.03mm) |
| 角度精度 | ±2度 |
| 定位方式 | CCD自動(dòng)對(duì)位 |
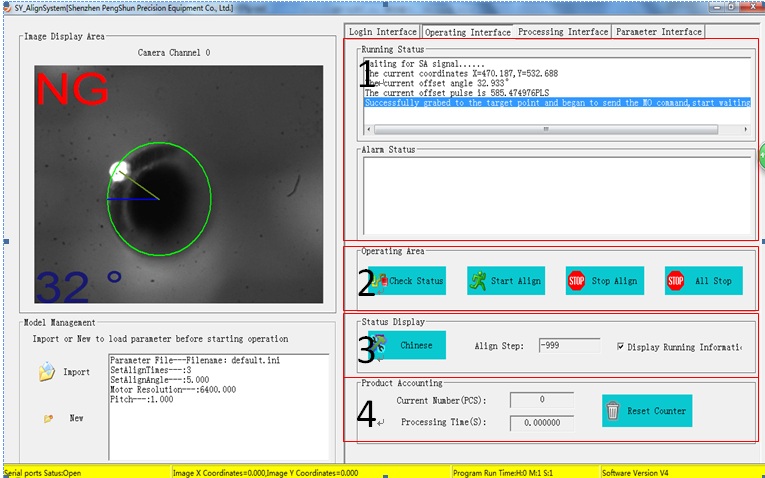
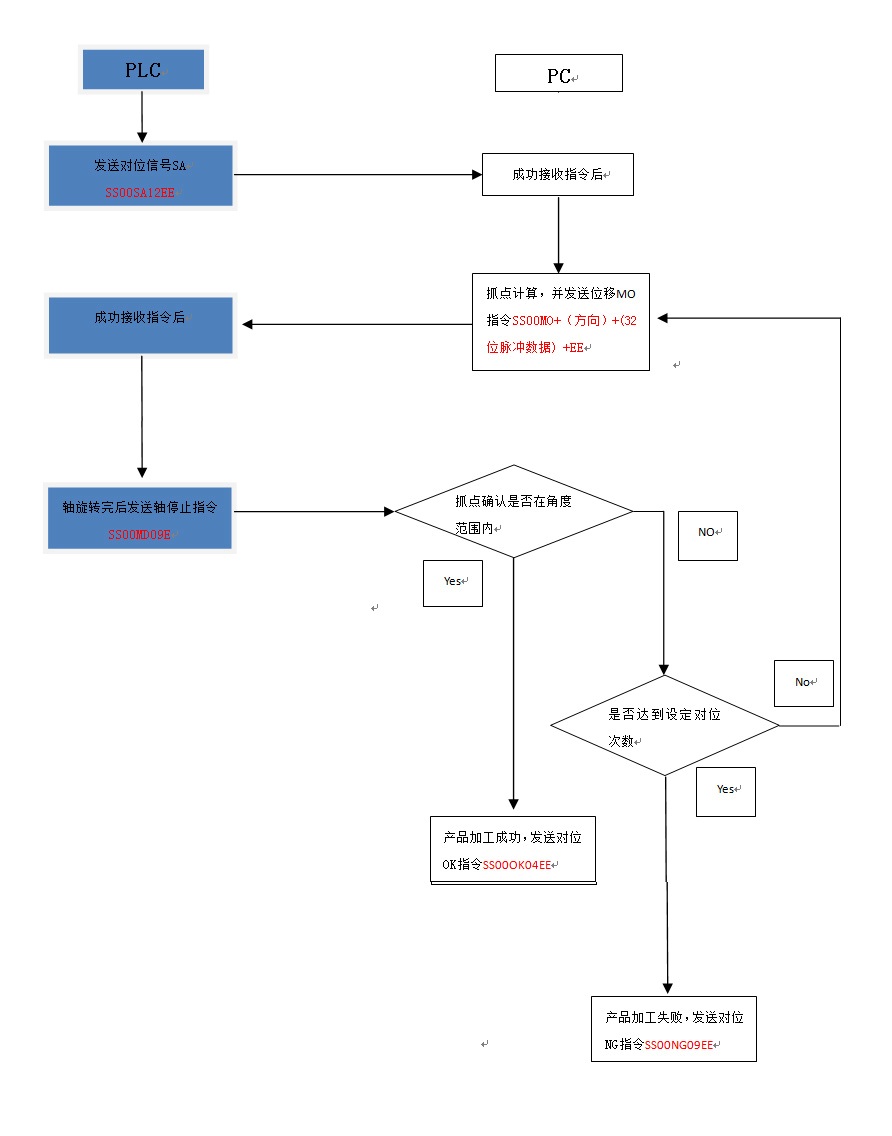
設(shè)備控制架構(gòu)
我們采用軟件加硬件的控制架構(gòu)�,圖像處理部分(圖像采集���、圖像分析處理���、定位算法等)均采用基于PC-Based來(lái)進(jìn)行開(kāi)發(fā)。基于工業(yè)PC的工業(yè)控制系統(tǒng)(PC-based Control System)能更加快速有效地進(jìn)行數(shù)據(jù)處理和相互通訊���,能靈活的在工業(yè)控制環(huán)境中控制各個(gè)終端并且相互之間能快速通信���,便于生產(chǎn)的監(jiān)控和管理。而且���,更重要的是�,它是一種完全開(kāi)放的系統(tǒng),非常利于產(chǎn)品的開(kāi)發(fā)�、維護(hù)和后續(xù)的升級(jí)。在這里我們主要以高速的處理器����、多線程處理和高速通信為基礎(chǔ)來(lái)提升整個(gè)系統(tǒng)的處理速度。?設(shè)備運(yùn)動(dòng)控制&視覺(jué)系統(tǒng)精度(1)設(shè)備傳動(dòng)部分 設(shè)備傳動(dòng)部分�����,采用PLC來(lái)控制�����。 (2)視覺(jué)部分此CCD自動(dòng)定位裝針檢測(cè)插針機(jī)設(shè)備視覺(jué)部分由1顆130萬(wàn)像素分辨率的德國(guó)工業(yè)級(jí)相機(jī)����,搭配高精度的遠(yuǎn)心鏡頭和日本W(wǎng)aveCrest工業(yè)專(zhuān)用光源(使用壽命長(zhǎng)、專(zhuān)用電源給LED光源供電時(shí)�,達(dá)到最大照度的時(shí)間小于10s)組成。表2視覺(jué)組成部分| 產(chǎn)品描述 | 視野范圍 | 分辨率(Pixel) | 視覺(jué)精度 |
| 德國(guó)工業(yè)相機(jī) | 2.4mm x 1.8mm | 1280x960 | 0.001875mm/Pixel |
| 遠(yuǎn)心鏡頭 | 2.4mm x 1.8mm | 百萬(wàn)像素分辨率 | - |
| 日本W(wǎng)aveCrest工業(yè)級(jí)光源 | 低角度無(wú)影環(huán)形紅光 |
從表2可知�����,視覺(jué)部分的精度為1.875微米/像素,自動(dòng)定位部分的精度能夠得到保證�����。(3)定位原理及優(yōu)點(diǎn)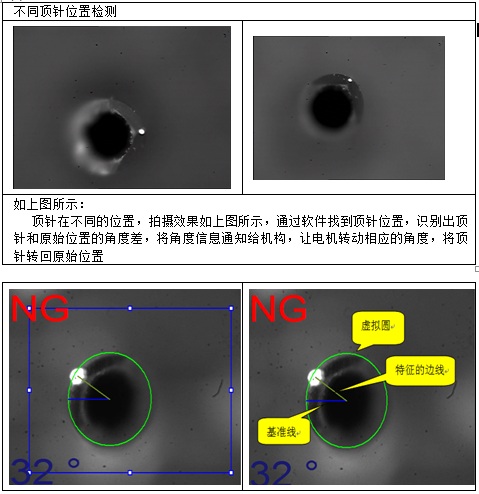 (4) 頂針正反檢測(cè)
(4) 頂針正反檢測(cè) 頂針正反面拍圖如上兩圖所示�����,通過(guò)圖像處理軟件較容易就能夠識(shí)別出產(chǎn)品正反面����,并通過(guò)DO信號(hào)輸出�����,通知機(jī)構(gòu)將位置出錯(cuò)的產(chǎn)品丟棄���。 為了滿足高精度的定位取料和產(chǎn)品角度調(diào)整�,需要機(jī)構(gòu)保證以下精度����。(1)水平送料精度:機(jī)構(gòu)上料精度一般保證在0.3mm內(nèi),這樣可保證檢測(cè)精度,若是上料精度太差����,則需要兩次對(duì)位調(diào)整才能滿足要求。(2)頂針垂直精度:頂針垂直方向精度需要保證在0.3mm內(nèi)�,因?yàn)殓R頭景深的原因,精度若是不能保證���,就無(wú)法保證最終拍攝的效果���,影響到頂針位置識(shí)別校正部分的算法。
頂針正反面拍圖如上兩圖所示�����,通過(guò)圖像處理軟件較容易就能夠識(shí)別出產(chǎn)品正反面����,并通過(guò)DO信號(hào)輸出�����,通知機(jī)構(gòu)將位置出錯(cuò)的產(chǎn)品丟棄���。 為了滿足高精度的定位取料和產(chǎn)品角度調(diào)整�,需要機(jī)構(gòu)保證以下精度����。(1)水平送料精度:機(jī)構(gòu)上料精度一般保證在0.3mm內(nèi),這樣可保證檢測(cè)精度,若是上料精度太差����,則需要兩次對(duì)位調(diào)整才能滿足要求。(2)頂針垂直精度:頂針垂直方向精度需要保證在0.3mm內(nèi)�,因?yàn)殓R頭景深的原因,精度若是不能保證���,就無(wú)法保證最終拍攝的效果���,影響到頂針位置識(shí)別校正部分的算法。